The exercise described here, somehow succeeded. The existing work on RPI and ARM, has been really helpful.
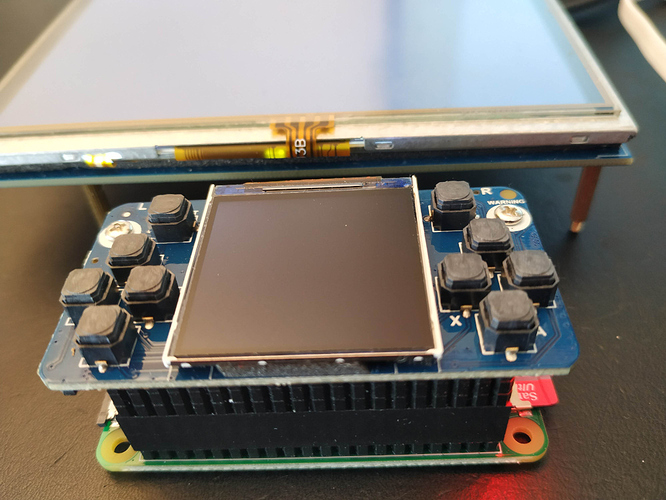
Summary: Embedd our engine in a Linux Embedded System that could be trimmed to only play urho3d games. Deploy the system on specific popular Hardware. In other words, the Urho3d-Only Video Game Console.
I am in the process of converting this exercise in a project, small website for downloading the images, instructions for building your own, etc etc. So I’d like to gather your comments (polluting the forums as less as possible) regarding:
Name: Propose a name for this. You can comment if some other proposal in this thread you specially like or dislike(indicate the reasoning in this case). As the background intention is to promote our engine, proposals containing urho are preferred.
Targets: If you would like to test or be involved, indicate which Raspberry PI models you own. Other boards are also welcome, but they must be yocto supported. Each build takes several hours, and ~50GB of disk space, therefore I need to go for the most relevant targets.
Project templates: The games would need to follow some standard, this standard we can be based in our already existing templates. Indicate if there is any template missing in this thread.
Game definition: Eventually there will be some kind of game selector(name wanted), as such, the project template should contain some kind of Game-Manifest. (Name, Desc, Genre, …)
Comments: Feel free to add your comments & Questions
Topics regarding games distribution like:
- “How do I build my game for this platform?”,
- “How will the system fetch/download my Game”
Will be addressed later on a third loop. My initial intention is maintain myself the opensourced and most close to a determined official template as part of the project, even preinstall them in the image.
Please read other users before posting, I beg you, 1 reply per user(edit your post as long as the following 2 weeks). As a start, I will give my own:
Name: UrhoTank(from fishTank, might sound warlike in many languages or relate to Tank games, which would be misleading)
Targets: Rasp 0w
Project Templates:
- https://github.com/ArnisLielturks/Urho3D-Project-Template
- https://gitlab.com/luckeyproductions/QtCreatorUrho3DWizards
- https://github.com/BlueMagnificent/Urho3D_CodeBlocks_Wizard
Game Definition: I don’t know previous exercises, or already defined standards, maybe from other gamming hubs. Initial proposal: Xml containing (Name, SubName, Description, Version, Genre, Sample Pictures, Requeriments Benchmark) Pictures should be contained in the Resources folder.
Comments: I already spoke way too much, hope this way of gathering information is ok, once everything is setup I can move most of discussions out.






 …
…


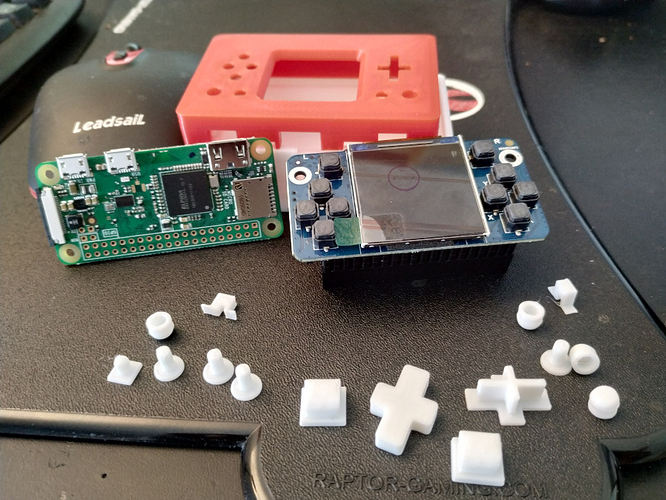
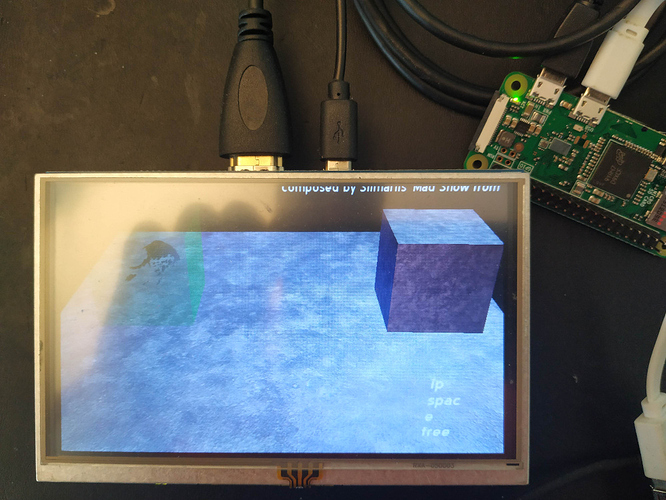
 Is one of those cross acting as the pointing device/mouse? Can’t wait to see all together!
Is one of those cross acting as the pointing device/mouse? Can’t wait to see all together! but it is the next topic I will work. It must be very easy reach that stage.
but it is the next topic I will work. It must be very easy reach that stage. sorry, I missed to commit the very last stuff. Just pull the latest changes from meta-urho3d repo again. To recover the environment, you only need to repeat the:
sorry, I missed to commit the very last stuff. Just pull the latest changes from meta-urho3d repo again. To recover the environment, you only need to repeat the: